|
|
|
||||
|
||||||
| Escuela Superior de Cómputo (ESCOM) | Instituto Politecnico Nacional | ||||||
|
APLICACIÓN DE SIMULACIÓN E INTERPRETACIÓN EN FÍSICA PROYECTO HENOC TT-20070102
HARDWARE DE ENTRADA. El Hardware de entrada está compuesto por una webcam y un apuntador, de esta manera, la webcam deberá de ser capaz de traducir los movimientos del apuntador en trazos, que posteriormente describirán un bosquejo que el sistema será capaz de reconocer y simular.
INTERFAZ ADAPTATIVA. El tamaño del lienzo (por comodidad un pizarrón), la distancia tanto de la webcam, como del proyector, así como las características peculiares del apuntador, son parámetros variables, podríamos decir que hasta cierto punto, inciertos, por esta razón la Interfaz Adaptativa juega un papel importante en la parametrización de la aplicación, de esta manera, el sistema se puede adaptar a ambientes diversos, en resumen, sería como calibrar un touchscreen.
SISTEMA DE CAPTURA DE VIDEO. La Adquisición de Datos (video) desde la webcam, es el punto de entrada en el sistema, prácticamente a la par que se están capturando los fotogramas, este bloque, tiene la labor de tratar la Imagen; mediante técnicas de tratamiento digital de imágenes (en este caso umbralización) dejamos en la imagen únicamente la información que nos interesa para los pasos posteriores.
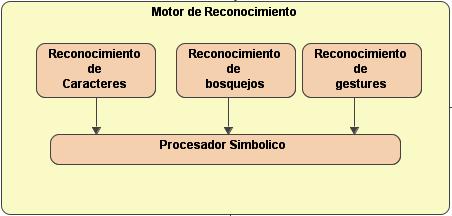
MOTOR DE RECONOCIMIENTO. Se encargara de entender los trazos del usuario, tiene varias vertientes dependiendo del estado del sistema.
RECONOCIMIENTO DE CARACTERES. Este módulo es el encargado de convertir los trazos del usuario en números, en esta parte, lo único que nos interesan son números y nada más.
RECONOCIMIENTO DE BOSQUEJOS. Esta parte es la encargada de reconocer todos los trazos del usuario que están involucrados en el diseño del bosquejo a simular, por ejemplo, reconocer que dibujo es un plano inclinado. RECONOCIMIENTO DE GESTURES. En algún punto del sistema, nos encontraremos con que no necesitamos solamente de un modo de edición, sino de un modo para comandos también, es decir, que para seguir la interacción con la computadora, vamos a necesitar que el sistema emule las funciones de un mouse para poder hacer clic en algunos objetos, como serian botones, etc.
PROCESADOR SIMBÓLICO. Al final todas las etapas anteriores dentro del motor de reconocimiento convergen a un módulo que va a procesar esos símbolos de la manera que considere más adecuada.
MOTOR DE FÍSICA. Después de que hayamos obtenido una serie de símbolos que la aplicación pueda entender, tras el reconocimiento de imágenes, entonces necesitamos interactuar con esos símbolos y generar un modelo físico.
CAPA DE ABSTRACCIÓN FÍSICA. Es necesario sentar las bases y/o condiciones iníciales para cualquier modelo, en esta parte podríamos decir que se genera un mini-mundo, donde se establecen características intrínsecas, como la gravedad.
MÓDULO DE ESTÁTICA. Se va a encargar de procesar la parte que tiene que ver con la Estática.
MÓDULO DE CINEMÁTICA. Se va a encargar de procesar la parte que tiene que ver con la Cinemática.
MÓDULO DE DINÁMICA. Se va a encargar de procesar la parte que tiene que ver con la Dinámica.
CÁLCULOS NUMÉRICOS. En base a los parámetros recogidos por el módulo de reconocimiento de caracteres, vamos a poder tener valores, para nuestro modelo, tales como masa, fuerza, distancia, etc.
ANIMACIÓN. Tras haber realizado todos los cálculos y haber generado ya nuestro modelo, con esta parte del sistema se realizará una pequeña animación/simulación del modelo generado.
HARDWARE DE SALIDA. El proyector va a ser nuestra interfaz de salida, tal y como lo sería un monitor en una PC, casi todos los módulos tienen una interacción directa con este dispositivo, puesto que el usuario siempre necesita una retroalimentación, de lo que está haciendo se vea reflejado en pantalla. |